

ジェネリックなのでコスパがいい!しかも750mgタイプを買って分割すれば更にコスパがよくなるので躊躇せずに使える!

左記クレジットカード、銀行振込、コンビニ決済に対応
左記クレジットカード、銀行振込、コンビニ決済に対応



更新日:2025/6/13
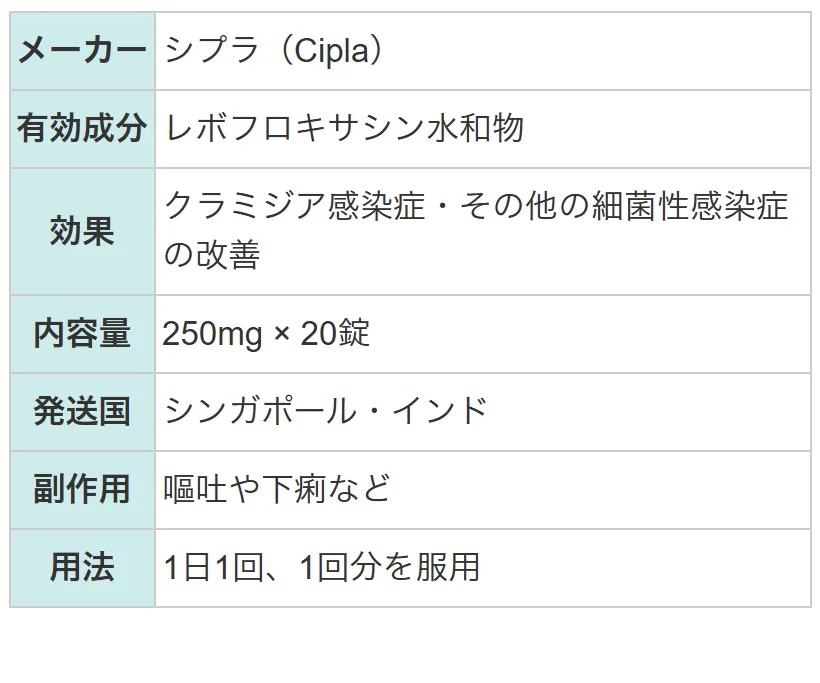
LQuin(クラビットジェネリック)は、病院で処方される抗菌薬クラビットと同一の有効成分(レボフロキサシン)を含有しているジェネリック医薬品です。
正しい服用により、炎症を伴う細菌感染症に効果を発揮し、性感染症のクラミジアも完治させることが可能です。
| メーカー | シプラ(Cipla) |
|---|---|
| 有効成分 | レボフロキサシン水和物 |
| 効果 | クラミジア感染症・その他の細菌性感染症の改善 |
| 副作用 | 嘔吐や下痢など |
| 用法 | 1日1回、1回分を服用 |
レボフロキサシンには、細菌のDNA複製を抑制することで殺菌的に働く作用があります。DNA複製に欠かせない2つの酵素(DNAジャイレース、トポイソメラーゼIV)の働きを阻害することで死滅させ、効果を発揮します。
Lquin(クラビットジェネリック)には、1錠あたりの含有量が異なる250mg錠、500mg錠、750mg錠の3種類があります。

| 個数 | 販売価格(1錠あたり) | 販売価格(箱) | ポイント | 購入 |
|---|---|---|---|---|
| 20錠 | 113円 | 2,260円 | 67pt | |
| 40錠 | 86円 | 3,460円 | 103pt |
| 個数 | 販売価格(1錠あたり) | 販売価格(箱) | ポイント | 購入 |
|---|---|---|---|---|
| 10錠 | 216円 | 2,160円 | 64pt | |
| 30錠 | 162円 | 4,860円 | 145pt |
| 個数 | 販売価格(1錠あたり) | 販売価格(箱) | ポイント | 購入 |
|---|---|---|---|---|
| 5錠 | 492円 | 2,460円 | 73pt | |
| 15錠 | 324円 | 4,860円 | 145pt |






①1万円以上で送料無料
1回の注文で10,000円以上だった場合、1,000円の送料が無料となります。
まとめ買いをすると1商品あたりのコストパフォーマンスが高くなるためおすすめです。
②プライバシー守る安心梱包
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。

③100%メーカー正規品取り扱い
当サイトの商品は100%メーカー正規品となっており、第三者機関による鑑定も行っております。
商品の破損などがあった場合は再配送などにて対応させて頂きますので、ご連絡頂ければ幸いです。

④いつでも購入可能 処方箋不要
サイト上では24時間いつでもご注文を受けております。
また、お電話によるご注文も受け付けておりますのでネットが苦手な方はお気軽にどうぞ。

⑤商品到着100%
商品発送後はお荷物の追跡状況が分かる追跡番号をご案内させて頂きます。
郵便局には保管期限がありますのでご注意ください。
・自宅配達で不在だった場合の保管期限・・・16日間前後
・郵便局留めとした場合の保管期限・・・7~30日間

⑥コンビニ決済利用可能
ご近所のコンビニにていつでもお支払可能です。
セブンイレブンに限り店舗での機械操作を必要とせず、手続き完了後に表示されるバーコードや払込票番号をレジに提示することでお支払い頂けます。

LQuin(クラビットジェネリック) 250mg x 20錠
2,260円
ポイント:67pt
10,000円以上購入で送料無料
在庫あり

ジェネリックなのでコスパがいい!しかも750mgタイプを買って分割すれば更にコスパがよくなるので躊躇せずに使える!
結構しっかりめに効いてくれるかわりに、副作用も結構しっかりめ。最初は我慢して使ってたけど、我慢の限界になってきました。他にもっと副作用が少ない薬を使いたいと思います。
肺炎や気管支炎、膀胱炎、腎盂腎炎、皮膚の感染症など、細菌によるさまざまな病気に使われる薬です。細菌の増殖を抑えて、感染症の悪化を防ぐ役割を持っています。
体の中に入ってすぐに細菌の活動を抑え始めるため、通常1日から数日以内に症状の改善が感じられることが多いです。ただし、感染の種類や重さによって差があるため、適切な期間服用を継続するようにしてください。
1回の服用でも体の中にしばらくとどまり、約24時間にわたって効果を発揮するとされています。毎日決まった時間に飲み続けることで、しっかり感染症を治すことができます。
クラビット・ジェネリックは、軽い感染症だけでなく、重い肺炎や慢性呼吸器病変の悪化時などにも使われます。特定の細菌に強く働くため、重症の場合でも使われることがあります。
クラビット・ジェネリックは、基本的に1日1回飲む薬です。決まった時間に飲み続けることで、体の中で薬の効果がしっかり続くようになっています。先生の指示通りに忘れず飲みましょう。
クラビット・ジェネリックは食事の影響をあまり受けないので、食前でも食後でも飲めます。胃への負担が気になる人は、食後に飲むと安心かもしれません。
飲み忘れたときは、気づいたらすぐに1回分だけ飲みましょう。ただし、次に飲む時間が近いときは、忘れた分はスキップして、次の分を通常通り飲んでください。2回分まとめて飲んではいけません。
クラビット・ジェネリックは、症状が軽くなったと感じても、自己判断で飲むのをやめてはいけません。指示された期間はきちんと飲み切らないと、感染症がぶり返すことがあります。
まれに下痢や吐き気、頭痛、眠れない感じが出ることがあります。ほとんどは軽い症状ですが、強い違和感があったらすぐに先生に相談しましょう。
クラビット・ジェネリックを飲んでいる間は、薬の影響で肌がいつもより敏感になることがあるので、外に出るときは日焼け止めや帽子でしっかり対策し、日差しに当たりすぎないように注意が必要です。
クラビット・ジェネリックは、胃薬やサプリメント(カルシウム、鉄分を含むもの)と一緒に飲むと、薬の吸収が悪くなることがあります。飲み合わせが心配なときは、必ず薬剤師さんに相談しましょう。
クラビット・ジェネリックに対してアレルギーがある人は飲んではいけません。以前にクラビット・ジェネリックや似た薬で発疹や息苦しさが出たことがある人は、必ず先生に伝えてください。
| 1日の服用回数 | 1回 |
|---|---|
| 1回の服用量 | 500mg |
| 服用のタイミング | 指定なし |
| 服用期間 | 24時間 |
| 商品名 | セフジン | セファデックス | エリスロマイシンTC | レボクイン | アカミン | ファロネム | セファデックス | イトラコナゾールジェネリック |
|---|---|---|---|---|---|---|---|---|
| 商品画像 |  |  |  |  |  |  |  |  |
| 特徴1 | ・副作用やアレルギー症状がペニシリン系より少ない | ・抗生物質の中でも副作用が少ない部類 | ・ひとつでさまざまな細菌感染症に対応 | 多様な細菌感染症に効く抗菌薬 | ・他人に知られたくない性病を治療できる | ・副作用が少なくて安心 | ・細菌を死滅させる | ・国内処方もされている薬のジェネリック |
| 特徴2 | ・効果と安全性の両方が高い | ・性病以外の感染症にも有効 | ・日本でも処方されている成分だから安心 | 性病のクラミジア治療にも使える | ・ディヴァインより低価格で試せる | ・様々な感染症治療に使える抗生物質 | ・グラム陽性菌やグラム陰性菌の一部に有効 | ・さまざまな真菌感染症に対して効果を発揮する |
| 内容量 | 300mg100錠x1箱 | 250mg200錠x1箱 | 200mgx16錠 | 250mgx10錠 | 50mgx60錠 | 200mg10錠x1箱 | 250mg200錠x1本 | 100mgx28錠 |
| 価格 | 15,360円 | 4,360円 | 4,360円 | 2,560円 | 5,160円 | 5,160円 | 8,560円 | 5,260円 |
| 1〜5%未満 | 1%未満 | 頻度不明 | |
| 過敏症 | 発疹 | そう痒症 | 蕁麻疹、光線過敏症 |
| 精神神経系 | めまい、不眠、頭痛 | 傾眠、振戦、意識障害 | 幻覚、錐体外路障害、ぼんやり、しびれ感 |
| 泌尿器 | 血尿、クレアチニン上昇 | 頻尿、尿閉、無尿、尿蛋白陽性、BUN上昇 | |
| 肝臓 | ALT上昇、LDH上昇、AST上昇 | 肝機能異常、γ-GTP上昇、血中ビリルビン増加、ALP上昇 | |
| 血液 | 白血球数減少、好酸球数増加、好中球数減少、血小板数減少 | リンパ球数減少、貧血 | |
| 消化器 | 悪心、嘔吐、下痢、腹部不快感、食欲不振 | 腹痛、口渇、腹部膨満、胃腸障害、消化不良、便秘 | 口内炎、舌炎 |
| 感覚器 | 味覚異常、耳鳴 | 味覚消失、視覚異常、無嗅覚、嗅覚錯誤 | |
| 循環器 | 動悸 | 低血圧、頻脈 | |
| その他 | 胸部不快感、CK上昇、四肢痛、関節痛、咽喉乾燥、尿中ブドウ糖陽性、熱感、浮腫 | 高血糖、筋肉痛、発熱、関節障害、発汗、胸痛、脱力感、倦怠感 |
本製品は海外製のため、期限表記が日本と異なる場合がございます。
パッケージ裏面や側面、シートなどに以下のような表記がされています。
| EXP | 使用期限 例:EXP 12/2025→2025年12月まで使用可 |
|---|---|
| MFG または MFD | 製造日 例:MFG 03/2023 |
| BEST BEFORE | 品質が最も安定している目安日 |
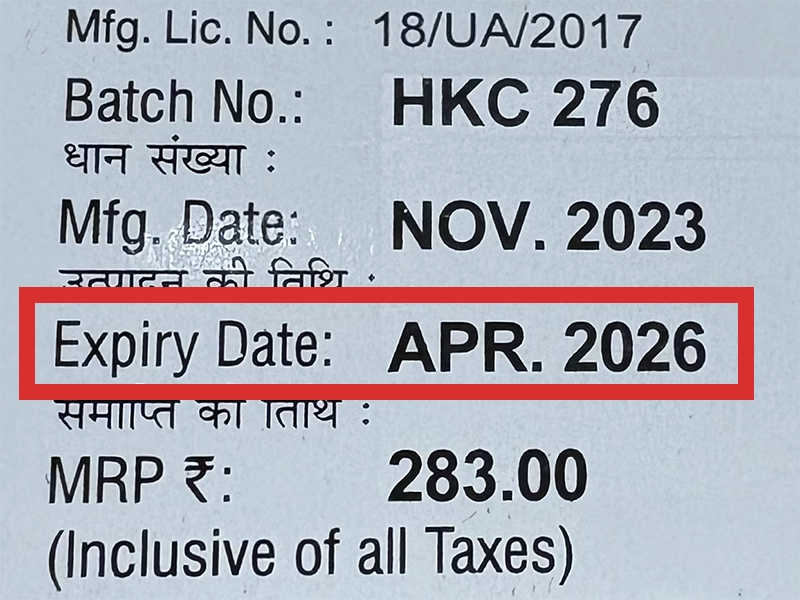
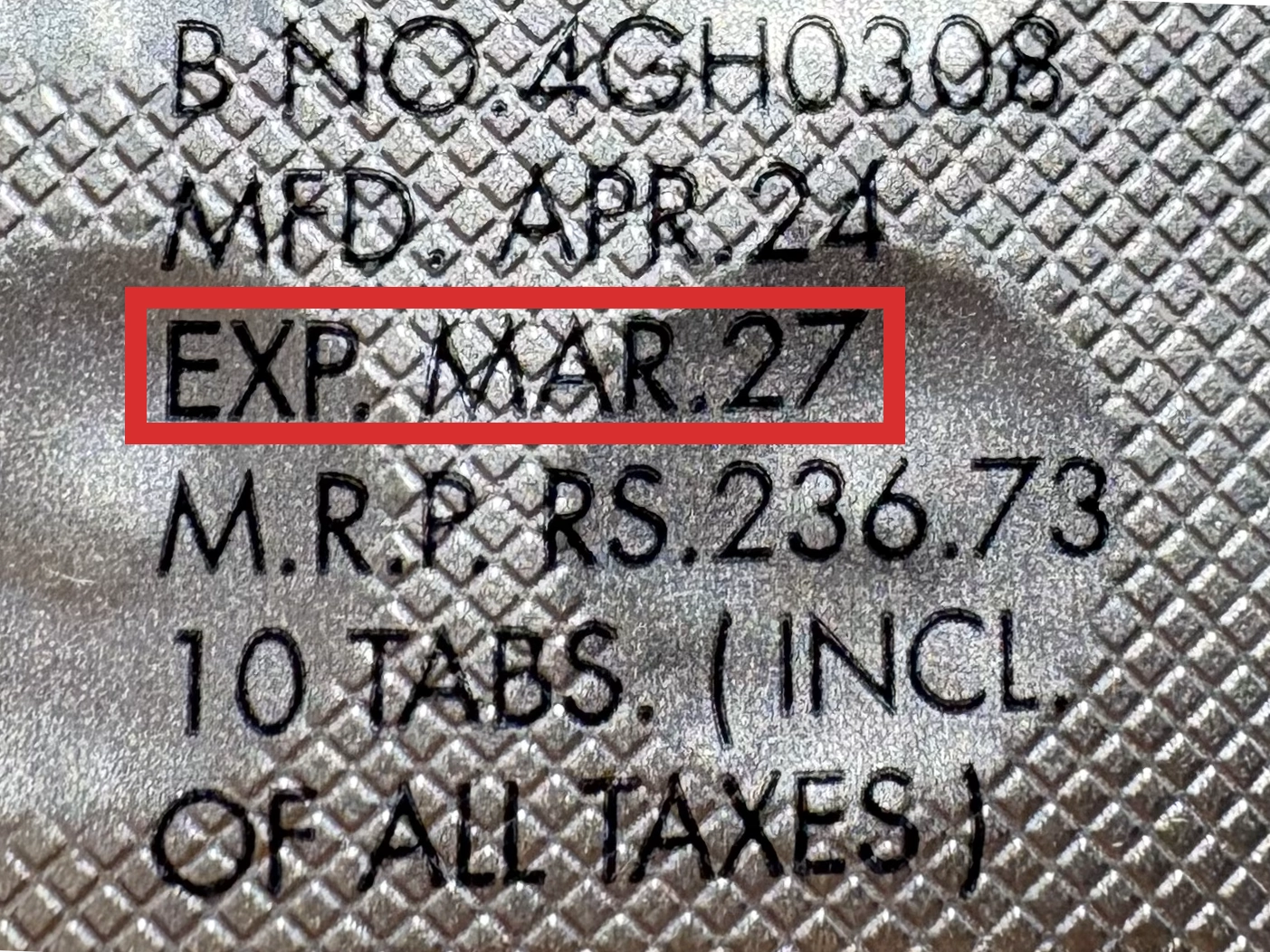
※国や製品により日付の並び(例:月/年、日/月/年)が異なる場合がありますのでご注意ください
EXP(Expiry Date) の表記がなく、MFG または MFDしか記載がないケースがあります。
この場合は MFG(MFD) から2~3年が使用期限の目安です。
※「LOT」や「BATCH」の表記は製造番号であり期限ではありません。

パッケージ例となります。
商品やご注文単位によってはシート単位でのお届けとなる場合が御座います。
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。
病院で処方してもらったクラビットと比べるとわずかに効果が弱いと感じる。ただ、安いのでこれで十分満足。
誰にも知られず性病を治せました。ありがとうございます。ただ、副作用だと思うんだけど、服用するとぼーっとするようになったので、飲むのは寝る前がよさそうです。
ジェネリックなのでコスパがいい!しかも750mgタイプを買って分割すれば更にコスパがよくなるので躊躇せずに使える!
リピートです。一週間程で到着しました。手配が早くて助かりました。
結構しっかりめに効いてくれるかわりに、副作用も結構しっかりめ。最初は我慢して使ってたけど、我慢の限界になってきました。他にもっと副作用が少ない薬を使いたいと思います。
商品口コミの投稿は会員のみ行えるようになっております。
お手数ですが会員ログインの上でご投稿頂きますようお願いいたします。
口コミをご投稿頂いたお客様にはポイントをプレゼントさせて頂いております。
文章のみであれば100ポイント、文章+写真付きのものは300ポイントをプレゼントさせて頂きます。
規約や詳細などはこちらをご確認くださいませ。