
飲んでから約1時間で普段はダラダラかいていた顔と頭からの汗が止まりました。暑いからかく汗だけでなく、緊張性の汗も止まる様です。ただ、自分だけかもですが、副作用に「喉が渇く」がありますが、それ所じゃないです。唾液が一滴も出なく口内がカサカサになります。話すのが仕事の方は難儀かもですね。

左記クレジットカード、銀行振込、コンビニ決済に対応
左記クレジットカード、銀行振込、コンビニ決済に対応



更新日:2025/6/6
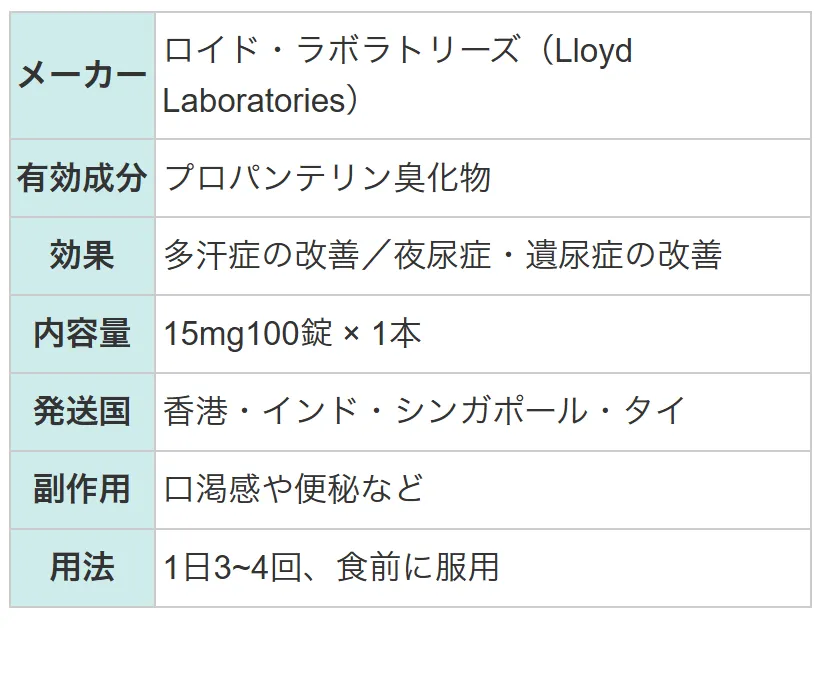
プロスパスは、多汗症や頻尿など「出過ぎて困る」という症状を改善させる医薬品です。
有効成分のプロパンテリン臭化物は即効性が高く、さらに制汗効果が5時間ほど続くという特徴があります。
| メーカー | ロイド・ラボラトリーズ(Lloyd Laboratories) |
|---|---|
| 有効成分 | プロパンテリン臭化物 |
| 効果 | 多汗症の改善/夜尿症・遺尿症の改善 |
| 副作用 | 口渇感や便秘など |
| 用法 | 1日3~4回、食前に服用 |
プロパンテリンは抗コリン作用を持つ有効成分で、エクリン汗腺に作用して発汗を促進するアセチルコリン(神経伝達物質)の働きを抑制します。また膀胱の収縮を抑制することによって頻尿を解消します。
プロスパスは、1錠あたり15mgのプロパンテリンを含有しています。

| 個数 | 販売価格(1本あたり) | 販売価格(箱) | ポイント | 購入 |
|---|---|---|---|---|
| 1本 | 6,960円 | 6,960円 | 208pt | |
| 2本 | 4,330円 | 8,660円 | 259pt |






①1万円以上で送料無料
1回の注文で10,000円以上だった場合、1,000円の送料が無料となります。
まとめ買いをすると1商品あたりのコストパフォーマンスが高くなるためおすすめです。
②プライバシー守る安心梱包
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。

③100%メーカー正規品取り扱い
当サイトの商品は100%メーカー正規品となっており、第三者機関による鑑定も行っております。
商品の破損などがあった場合は再配送などにて対応させて頂きますので、ご連絡頂ければ幸いです。

④いつでも購入可能 処方箋不要
サイト上では24時間いつでもご注文を受けております。
また、お電話によるご注文も受け付けておりますのでネットが苦手な方はお気軽にどうぞ。

⑤商品到着100%
商品発送後はお荷物の追跡状況が分かる追跡番号をご案内させて頂きます。
郵便局には保管期限がありますのでご注意ください。
・自宅配達で不在だった場合の保管期限・・・16日間前後
・郵便局留めとした場合の保管期限・・・7~30日間

⑥コンビニ決済利用可能
ご近所のコンビニにていつでもお支払可能です。
セブンイレブンに限り店舗での機械操作を必要とせず、手続き完了後に表示されるバーコードや払込票番号をレジに提示することでお支払い頂けます。

プロスパス 15mg100錠 x 1本
6,960円
ポイント:208pt
10,000円以上購入で送料無料
在庫あり

飲んでから約1時間で普段はダラダラかいていた顔と頭からの汗が止まりました。暑いからかく汗だけでなく、緊張性の汗も止まる様です。ただ、自分だけかもですが、副作用に「喉が渇く」がありますが、それ所じゃないです。唾液が一滴も出なく口内がカサカサになります。話すのが仕事の方は難儀かもですね。
効き目が弱すぎる上に副作用だけはしっかり出る。これなら効果もしっかり出るように作ってほしかった。多汗症の対策はしたいと思っていますが、ただただ体調が悪くなるだけなのでもうやめることにしました。
プロスパスは多汗症や夜尿症、胃炎、過敏性腸症候群などの治療に用いられます。これは有効成分が抗コリン作用によって胃腸の運動や分泌を抑えるためです。さまざまな症状に対して用いられることから多くの人に使われています。
臨床成績によると多汗症では80%、胃潰瘍では84.1%、過敏性腸症候群では93.3%などいずれの症状に対しても非常に高い有効性が確認されています。幅広い症状に対して高い効果が期待できるのも特徴となっています。
胃酸分泌の抑制作用があるため、胃潰瘍や胃炎などの治療に用いられます。臨床試験でも消化性潰瘍患者において、胃液量やペプシンの分泌量を有意に低下させたとの報告もあります。
多汗症に対する効果には個人差があります。全くといっていいほど汗をかかなくなる方もいますし、あまり効果を感じられない方もいます。
通常、成人には1回15mgを1日3〜4回に分けて服用します。年齢や症状によっては用量を調整することがあります。一度に多く服用しても効果が高くなったりすることはない点には注意してください。
明確な食前・食後の指定はありません。ただし、作用によって胃酸の分泌などが抑えられるので、食後に服用すると消化に支障が出てしまう可能性があります。そのため、食前の服用が推奨されることが多いです。
過量投与により中枢神経症状や頻脈、呼吸抑制が生じるおそれがあります。1日の服用回数(3〜4回)を守り、飲み忘れても決して2回分をまとめて飲まないようにしてください。
はい、消化器への作用を安定させるためにも、できるだけ毎日同じ時間帯に服用することが推奨されます。効果の持続と副作用リスクの低減のため、時間を決めて飲みましょう。
副作用として排尿障害や口渇、便秘や頻脈などが出ることがあります。特に高温環境下で発汗が抑制されると、体温を下げることができずに熱中症になるリスクがあるため注意が必要です。
はい、抗コリン作用によって眠気やぼんやり感が出ることがあります。服用中は自動車の運転や機械操作など危険を伴う作業は事故につながってしまう可能性があるので、できる限り避けてください。
高齢者は副作用が出やすく、眼の調節障害や排尿障害などが強く出ることがあります。年齢に応じた用量調整と慎重な経過観察が必要となるため、用法用量などには特に注意が必要です。
授乳中の方の服用については、専門医に相談するなどして指示を仰ぐようにしてください。相談の結果、使用しても問題がないと判断された場合のみ使用するようにしてください。
| 1日の服用回数 | 3~4回 |
|---|---|
| 1回の服用量 | 15mg |
| 服用のタイミング | 指定なし |
| 服用間隔 | 6~8時間 |
| 商品名 | プロバンサイン | パースピレックスロールオン・コンフォート | サーテンDRIエクストラストレングスソリッド | アンハイドロルフォルテキューティニアスソリューション | サーテンDRIロールオン | プロポリス石鹸 | パースピレックスローション |
|---|---|---|---|---|---|---|---|
| 商品画像 |  |  |  |  |  |  |  |
| 特徴1 | つらい尿漏れ・頻尿をしっかり防ぐ | ・効果持続時間が長い | ・敏感肌の方も安心して使用できる | ・部分的な発汗を効果的に抑える | ・汗の量を減少させる | ・肌のキメを整えてハリやツヤを与える | ・一度の使用で制汗効果が長持ちする |
| 特徴2 | 発汗を防ぐ成分がワキガに効く | ・制汗剤の中では比較的お肌に優しい | ・汗の対策をしながら健やかな肌を保てる | ・就寝前に塗布するだけで簡単 | ・細菌による悪臭を改善 | ・肌荒れによる症状改善にも効果的 | ・肌に優しい処方なので安心して使える |
| 内容量 | 15mgx100錠 | 20mlx1本 | 48gx1本 | 60mlx1本 | 35.5mlx1本 | 75gx1個 | 100mlx1本 |
| 価格 | 7,560円 | 4,160円 | 5,260円 | 6,160円 | 4,960円 | 3,660円 | 5,560円 |
| 5%以上 | 0.1〜5%未満 | 0.1%未満 | 頻度不明 | |
| 眼 | 眼の調節障害等 | |||
| 精神神経系 | 頭痛・頭重、眩暈、眠気、不眠等 | |||
| 消化器 | 口渇、便秘 | 腹部膨満・不快感、胸やけ等 | ||
| 呼吸器・循環器 | 胸内苦悶等 | 心悸亢進 | ||
| 過敏症 | 発疹等 | |||
| 泌尿器 | 排尿障害 | |||
| その他 | 倦怠感、顔面潮紅、ほてり、嗄声 |
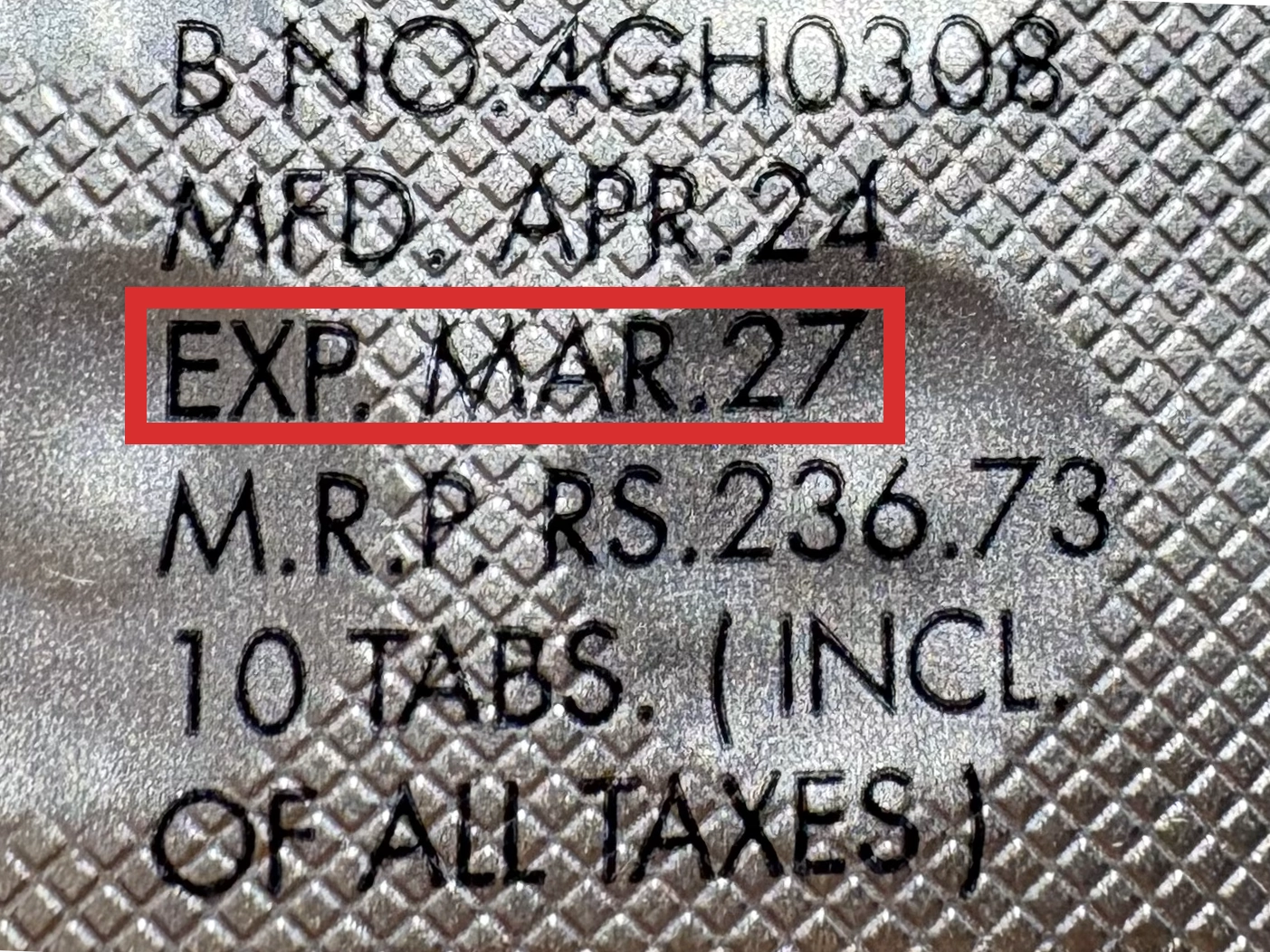
本製品は海外製のため、期限表記が日本と異なる場合がございます。
パッケージ裏面や側面、シートなどに以下のような表記がされています。
| EXP | 使用期限 例:EXP 12/2025→2025年12月まで使用可 |
|---|---|
| MFG または MFD | 製造日 例:MFG 03/2023 |
| BEST BEFORE | 品質が最も安定している目安日 |
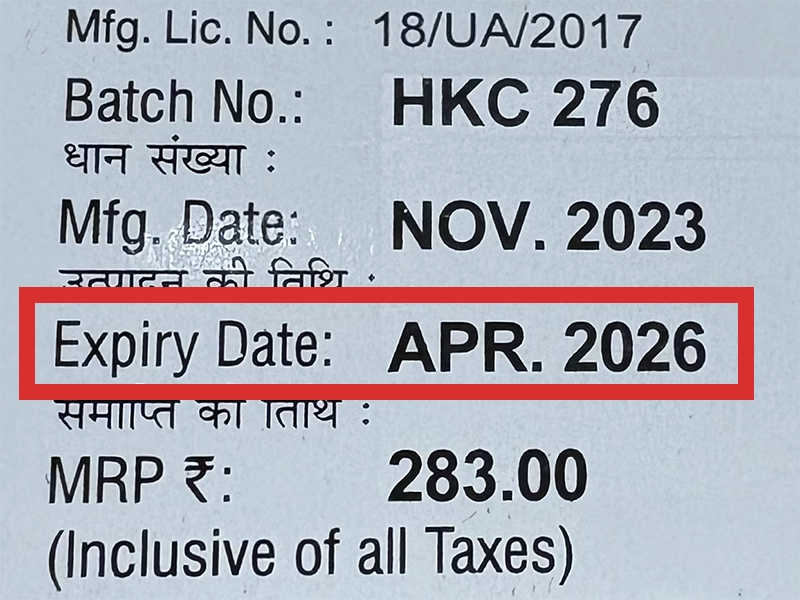
※国や製品により日付の並び(例:月/年、日/月/年)が異なる場合がありますのでご注意ください
EXP(Expiry Date) の表記がなく、MFG または MFDしか記載がないケースがあります。
この場合は MFG(MFD) から2~3年が使用期限の目安です。
※「LOT」や「BATCH」の表記は製造番号であり期限ではありません。

パッケージ例となります。
商品やご注文単位によってはシート単位でのお届けとなる場合が御座います。
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。
飲んでから約1時間で普段はダラダラかいていた顔と頭からの汗が止まりました。暑いからかく汗だけでなく、緊張性の汗も止まる様です。ただ、自分だけかもですが、副作用に「喉が渇く」がありますが、それ所じゃないです。唾液が一滴も出なく口内がカサカサになります。話すのが仕事の方は難儀かもですね。
小さい頃から太っていて、元々汗かきだったのですが、30代後半になるにつれて顔汗がひどくなり…冬以外はほんとに汗ダラダラかいてしまって恥ずかしいと思えば思うほど更に汗をかくという悪循環に悩まされ、髪の毛は濡れるし化粧はできないしで多汗症などを調べたらコチラの薬にたどり着きました。梅雨のジメジメの時期に朝の7時過ぎに1錠服用し仕事へ向かうといつもは着いたらダラダラでしたがお昼頃まではサラッとしており汗が止まりました!全く汗をかかなくなるわけではなかったですが!感激でした!暑い日や湿気が多い日は死ぬほど汗かいてたのに格段に減りました。副作用はたしかに口の乾きがひどい気がします。こまめに水分を取るか飴やガムを食べていたら問題なかったです。これから愛用していきたいと思います。
過去にプロバンサインを飲んだことがある、汗っかき野郎です。プロバンサインに比べると値段が安めなので、これだけでも使う理由になります。肝心の効果のほうは違いがあるのかどうか、まだよくわかっていないのが本音です。でも副作用がないので、星4評価です。
効き目が弱すぎる上に副作用だけはしっかり出る。これなら効果もしっかり出るように作ってほしかった。多汗症の対策はしたいと思っていますが、ただただ体調が悪くなるだけなのでもうやめることにしました。
空腹のときに飲まないと効果が弱まる気がします・・・常に空腹のときに飲めるとは限らないので、ちょっと不便です。ですが、効果は非常に高く、汗染みができるほど汗をかいていたのが嘘だったかのように、ぴたりと止まります。
商品口コミの投稿は会員のみ行えるようになっております。
お手数ですが会員ログインの上でご投稿頂きますようお願いいたします。
口コミをご投稿頂いたお客様にはポイントをプレゼントさせて頂いております。
文章のみであれば100ポイント、文章+写真付きのものは300ポイントをプレゼントさせて頂きます。
規約や詳細などはこちらをご確認くださいませ。