この価格で100錠も買えるのは凄いですね。病院で処方されるよりも多く買えます。薬代を抑えられて、トピナ錠と効き目は変わらないので大変助かっています。

左記クレジットカード、銀行振込、コンビニ決済に対応
左記クレジットカード、銀行振込、コンビニ決済に対応





更新日:2025/4/19

| 個数 | 販売価格(1錠あたり) | 販売価格(箱) | ポイント | 購入 |
|---|---|---|---|---|
| 100錠 | 49円 | 4,960円 | 148pt | |
| 200錠 | 44円 | 8,960円 | 268pt | |
| 300錠 | 40円 | 12,160円 | 364pt |






①1万円以上で送料無料
1回の注文で10,000円以上だった場合、1,000円の送料が無料となります。
まとめ買いをすると1商品あたりのコストパフォーマンスが高くなるためおすすめです。
②プライバシー守る安心梱包
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。

③100%メーカー正規品取り扱い
当サイトの商品は100%メーカー正規品となっており、第三者機関による鑑定も行っております。
商品の破損などがあった場合は再配送などにて対応させて頂きますので、ご連絡頂ければ幸いです。

④いつでも購入可能 処方箋不要
サイト上では24時間いつでもご注文を受けております。
また、お電話によるご注文も受け付けておりますのでネットが苦手な方はお気軽にどうぞ。

⑤商品到着100%
商品発送後はお荷物の追跡状況が分かる追跡番号をご案内させて頂きます。
郵便局には保管期限がありますのでご注意ください。
・自宅配達で不在だった場合の保管期限・・・16日間前後
・郵便局留めとした場合の保管期限・・・7~30日間

⑥コンビニ決済利用可能
ご近所のコンビニにていつでもお支払可能です。
セブンイレブンに限り店舗での機械操作を必要とせず、手続き完了後に表示されるバーコードや払込票番号をレジに提示することでお支払い頂けます。


てんかんによる発作の予防
25mgx50錠
2,960円

アルツハイマー型認知症の進行抑制
1.5mgx50錠
4,060円

うつ症状の改善
10mgx28錠
4,560円

てんかん発作の予防
50mgx28錠
5,360円

統合失調症などの改善
5mg28錠x1箱
6,460円

統合失調症などの改善
5mg28錠x1箱
6,560円

うつ症状の改善
40mg50錠x1箱
8,060円

うつ症状の改善
25mg50錠x1箱
6,560円

うつ症状の改善
20mg200錠x1箱
11,960円

うつ症状の改善
50mg100錠x1箱
7,960円

アルツハイマー型認知症の進行抑制
4mgx50錠
6,460円

治療抵抗性統合失調症の改善
100mgx100錠
5,060円

統合失調症の改善
25mgx60錠
5,360円
トピロール 25mg x 100錠
4,960円
ポイント:148pt
10,000円以上購入で送料無料
在庫あり

この価格で100錠も買えるのは凄いですね。病院で処方されるよりも多く買えます。薬代を抑えられて、トピナ錠と効き目は変わらないので大変助かっています。
通院して治療してますが決して良い病院とは思えないので、良い病院と先生に出会うまでの保険として買いました。てんかんの発作は怖いので手元に置いて常備しておきます。
てんかん薬の中には、副作用として倦怠感などがあらわれるものがあります。そのため、服用する薬によっては倦怠感を感じる可能性があります。あまりにも症状が酷いといった場合には、服用する薬の変更の相談などを行うようにしましょう。
てんかん薬の種類の中には、毛が薄くなるといったものはあります。逆に濃くなる種類の治療薬っていうものはないと考えられます。そのため、毛が濃くなったという場合には、てんかん薬以外の何か白が原因と考えられます。
てんかん薬を多量に服用したりした場合には、記憶力に影響を及ぼす可能性があったりします。ですが、適切にてんかん薬を使った場合にはそのリスクはほとんどないため、適切な用法用量を守って服用するようにしてください。
てんかんの場合に運転免許を取得するには、薬の服用は関係ありません。運転に支障があるような発作が数年にわたってない場合に取得できるとされているため、適切な治療を行い長期に渡って発作などが起きていない場合には取得することは可能といえます。
妊娠すること自体は可能ですが、催奇性の高い薬の場合はその分だけ奇形などのリスクは高まってしまいます。そのため、妊娠を希望する場合以外は適切な避妊を行う必要があります。また妊娠を希望する場合には、事前に医師に相談して妊娠とてんかん治療を両立することができる薬への変更などを行うことが重要になります。
治療薬の中止や再開を自己判断で行うのは大きなリスクがあります。医師と相談した上で適切な用法用量を守ってご使用ください。そのため、再開する場合であっても自己判断で行うのではなくまずは相談するようにしてください。
| 1日の服用回数 | 1~2回 |
|---|---|
| 1回の服用量 | 50~200mg |
| 服用のタイミング | 指定なし |
| 服用間隔 | 24時間以上 |
| 商品名 | (Emre Ecza)マイソリン | プリミドン | イノベロン | テグレトール・ジェネリック | ラミクタール | トパヒール |
|---|---|---|---|---|---|---|
| 商品画像 |  |  |  |  |  |  |
| 特徴1 | ・塩化物イオンの流入を促進 | ・塩化物イオンの流入を促す | ・ナトリウムイオンの流入を抑制 | ・国内で処方されている医薬品の後発品で安心 | ・治療困難なレノックス・ガストー症候群に有効 | ・先発薬は100カ国以上で承認されている |
| 特徴2 | ・神経の過剰な興奮を抑制 | ・抗けいれん作用、催眠・鎮静作用などをあらわす | ・てんかん発作を改善 | ・てんかんや躁うつ病などにも有効 | ・海外では双極性障害の第一選択薬 | ・部分発作による各症状の治療・改善に有効 |
| 内容量 | 250mg30錠x1箱 | 250mg100錠x1本 | 200mg60錠x1箱 | 200mgx25錠 | 25mgx30錠 | 25mg200錠x1箱 |
| 価格 | 4,660円 | 9,260円 | 18,760円 | 4,160円 | 4,760円 | 6,560円 |
本製品は海外製のため、期限表記が日本と異なる場合がございます。
パッケージ裏面や側面、シートなどに以下のような表記がされています。
| EXP | 使用期限 例:EXP 12/2025→2025年12月まで使用可 |
|---|---|
| MFG または MFD | 製造日 例:MFG 03/2023 |
| BEST BEFORE | 品質が最も安定している目安日 |
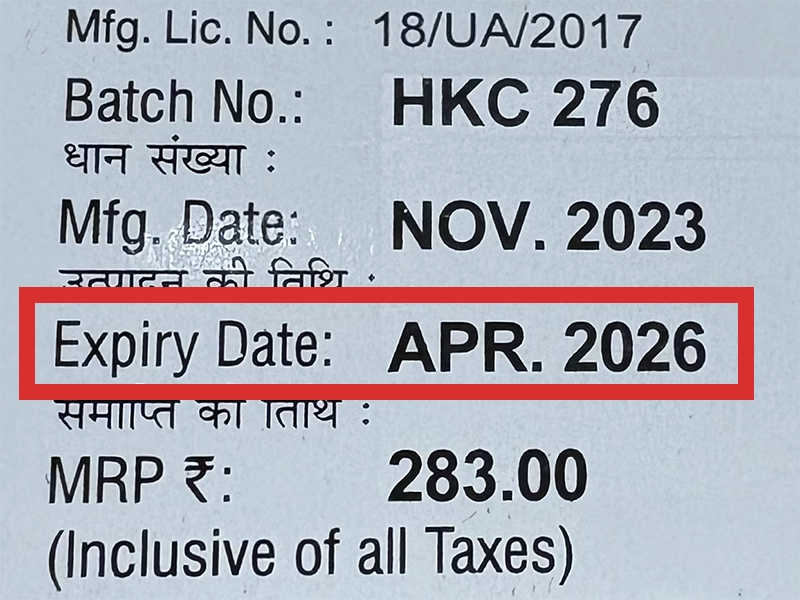
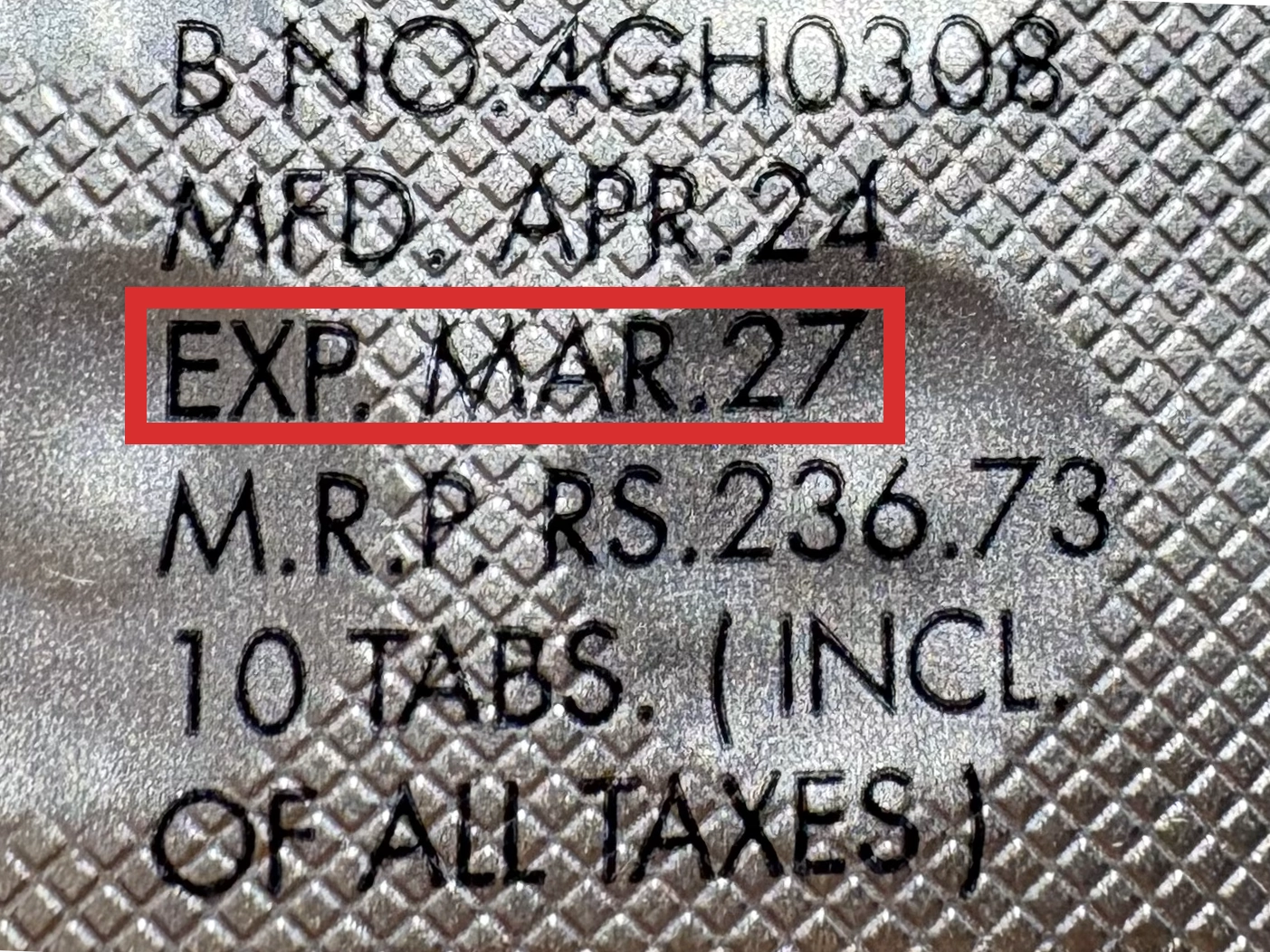
※国や製品により日付の並び(例:月/年、日/月/年)が異なる場合がありますのでご注意ください
EXP(Expiry Date) の表記がなく、MFG または MFDしか記載がないケースがあります。
この場合は MFG(MFD) から2~3年が使用期限の目安です。
※「LOT」や「BATCH」の表記は製造番号であり期限ではありません。

パッケージ例となります。
商品やご注文単位によってはシート単位でのお届けとなる場合が御座います。
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。
てんかん持ちなので薬は必要です。前までは病院に行って薬を処方してもらってたんですけど、最近はここで買うようにしています。家から出なくても薬が買えるので便利です。届くのに時間はかかってしまうので、ある程度早めに注文しておいた方がいいですよ。
この価格で100錠も買えるのは凄いですね。病院で処方されるよりも多く買えます。薬代を抑えられて、トピナ錠と効き目は変わらないので大変助かっています。
薬をトピロールにしてからはてんかん発作があまり起こらなくなってきました。私に合っている薬のようです。
注文してから大体2週間で届き、箱は丁寧に梱包されていました。ありがとうございます。
精神的に不安になると発作が出て悩んでました。完全に発作が収まった訳ではないですが効果は感じてます。助かりました!
商品口コミの投稿は会員のみ行えるようになっております。
お手数ですが会員ログインの上でご投稿頂きますようお願いいたします。
口コミをご投稿頂いたお客様にはポイントをプレゼントさせて頂いております。
文章のみであれば100ポイント、文章+写真付きのものは300ポイントをプレゼントさせて頂きます。
規約や詳細などはこちらをご確認くださいませ。