
更年期の影響で精神的に不安定になっていましたが、この薬で治療を継続すると気分が良い日が増えました。前向きになれているのが一番嬉しいです。

左記クレジットカード、銀行振込、コンビニ決済に対応
左記クレジットカード、銀行振込、コンビニ決済に対応



更新日:2025/4/21

| 個数 | 販売価格(1本あたり) | 販売価格(箱) | ポイント | 購入 |
|---|---|---|---|---|
| 1本 | 5,760円 | 5,760円 | 172pt | |
| 2本 | 4,080円 | 8,160円 | 244pt | |
| 3本 | 3,653円 | 10,960円 | 328pt |






①1万円以上で送料無料
1回の注文で10,000円以上だった場合、1,000円の送料が無料となります。
まとめ買いをすると1商品あたりのコストパフォーマンスが高くなるためおすすめです。
②プライバシー守る安心梱包
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。

③100%メーカー正規品取り扱い
当サイトの商品は100%メーカー正規品となっており、第三者機関による鑑定も行っております。
商品の破損などがあった場合は再配送などにて対応させて頂きますので、ご連絡頂ければ幸いです。

④いつでも購入可能 処方箋不要
サイト上では24時間いつでもご注文を受けております。
また、お電話によるご注文も受け付けておりますのでネットが苦手な方はお気軽にどうぞ。

⑤商品到着100%
商品発送後はお荷物の追跡状況が分かる追跡番号をご案内させて頂きます。
郵便局には保管期限がありますのでご注意ください。
・自宅配達で不在だった場合の保管期限・・・16日間前後
・郵便局留めとした場合の保管期限・・・7~30日間

⑥コンビニ決済利用可能
ご近所のコンビニにていつでもお支払可能です。
セブンイレブンに限り店舗での機械操作を必要とせず、手続き完了後に表示されるバーコードや払込票番号をレジに提示することでお支払い頂けます。

オエストロジェル 80g x 1本
5,760円
ポイント:172pt
10,000円以上購入で送料無料
在庫あり

更年期の影響で精神的に不安定になっていましたが、この薬で治療を継続すると気分が良い日が増えました。前向きになれているのが一番嬉しいです。
更年期障害のイライラや体調不良が辛くて、この薬を使っているんですがあまり効かないです。体全体の倦怠感も無くならないので、使う前の状態とほとんど変わらないです。また、飲み薬のようにお手軽感もありません。しっかり塗りこむために時間を割く必要があります。特に飲み薬に対して抵抗などが無いなら、飲み薬にした方がいいと思います。私も飲み薬に切り替えていきます。
ホットフラッシュ(ほてり)や発汗といった更年期の症状は、オエストロジェルの使用でかなり改善することがデータで示されています。特に8週間以上の継続使用で、ほとんどの人が1日あたりの症状の回数が半分以下になるケースも多く、長く使うことで効果が安定してくるといわれています。
女性ホルモンのエストロゲンには骨を守る働きがあり、閉経後にその分泌が減ると骨の密度が下がりやすくなります。ジェルでエストロゲンを補うことで骨の代謝が安定し、骨量の減少を防ぐ効果があるとされています。飲み薬に比べて消化器への負担が少なく、経皮吸収によって持続的にホルモンを補えるのも特長の一つです。
子宮内膜を厚く整えて妊娠しやすい状態にする目的でジェルが使われることがあります。自然妊娠を促すというより、人工授精や胚移植の成功率を高めるために、ホルモン環境を安定させる役割を担っています。
ホルモンの波を人工的に調整することで排卵や月経の周期を整えられます。特に不妊治療では、体外受精や移植のタイミングに合わせてホルモン状態をコントロールするために用いられることが多いようです。
毎日同じ時間帯に塗ることで血中のホルモン濃度を安定させやすくなるため、朝の習慣に組み込むのがすすめられています。夜に塗っても問題はありませんが、塗布後すぐに入浴したり肌がこすれたりすると吸収が妨げられることがあるため、塗る時間は生活リズムに合わせて安定させておくのが理想です。
強くすり込まず、肌にうすく均等にのばすだけでしっかり吸収されるように作られています。マッサージのようにこすりすぎると肌を傷めることもあるため、軽く広げる程度で十分です。
塗布後1時間以内に塗布した箇所を洗い流らないようにご注意ください。また、塗布した直後にアルコールを多量に含む化粧品等は使用しないようにしてください。
ジェルは血中ホルモンを一定に保つために毎日の使用が基本です。日を空けると濃度が不安定になり、効果が出にくくなることがあります。
ホルモン剤の使用によって太ることはありません。ただし、ホルモン剤を使用したことによって食欲が増したり、更年期による症状が回復したことで食欲が回復し、体重が増加してしまう可能性はあります。
配合されている有効成分と相性の悪い医薬品の場合、効果の変動や副作用の発現などの可能性があります。事前に相性について確認した上で使用するようにしてください。
使用期間にかかわらず、副作用の出方には個人差がありますが、長期間使い続けた場合に不正出血や乳房のはり、頭痛などがあらわれることがあります。とくにがんの既往歴がある場合にはリスク評価が必要になるため、定期的な診察と検査を受けながら使うことが基本とされています。
乳がんや子宮がんの既往がある人、血栓症のリスクが高い人、重い肝機能障害のある人などは使用が禁忌とされています。また、妊娠中や授乳中の方、原因不明の不正出血がある場合も使えないことがあります。使用の前には必ず医師の診察を受けることが必要です。
| 1日の使用回数 | 1回 |
|---|---|
| 1回の使用量 | 2.5g |
| 使用のタイミング | 朝もしくは夕方 |
| 使用間隔 | 24時間以上 |
| 使用する箇所 | 腹部や腕、内もも |
| 商品名 | プレモン | エチニラ | プレマリン | イブケア | ラジャグプラヴァタニ・ファーティ | オエストロドースジェル | ダーメストリル100 |
|---|---|---|---|---|---|---|---|
| 商品画像 |  |  |  |  |  |  |  |
| 特徴1 | ・のぼせや発汗の症状に対して効果的 | ・美肌効果をはじめとした副効果もある | ・中程度の作用がある有効成分を配合 | ・幅広い年齢の女性が摂取できる | ・多くの健康効果がある成分を配合 | ・皮膚刺激が少なく、安全性に優れている | ・肌に貼って使用する外用薬タイプ |
| 特徴2 | ・エストロゲンの増加で更年期障害を改善 | ・前立腺がんの対策にも効果が期待できる | ・更年期障害による不快な症状を緩和する | ・心と体にあらわれる症状の対策に効果的 | ・天然成分が女性ホルモンのバランスを整える | ・塗布した跡を気にせずに使用できる | ・信頼性が高いホルモン薬の成分を配合 |
| 内容量 | 0.625mgx112錠 | 0.05mgx112錠 | 0.625mg28錠x1箱 | 30錠 | 80錠 | 80gx1本 | 8mg24パッチx1箱 |
| 価格 | 4,060円 | 5,560円 | 6,800円 | 1,350円 | 1,460円 | 6,360円 | 11,460円 |
| 1%以上 | 1%未満 | 頻度不明 | |
| 生殖器 | 腟分泌物(18.3%)、性器出血、陰部そう痒症、骨盤痛 | 消退出血、不正子宮出血、外性器痛、外陰部炎、外陰腟不快感、子宮内膜生検異常、子宮筋腫、子宮頚管ポリープ | 腟乾燥、陰部そう痒症、子宮内膜症(再燃) |
| 乳房 | 乳房不快感(13.2%)、乳房痛、乳頭痛 | 乳房嚢胞 | |
| 皮膚 投与部位 | そう痒感、紅斑、湿疹 | 色素沈着変化、乾燥、刺激感 | |
| 皮膚 全身 | 湿疹、紅斑、色素沈着障害、そう痒症、ざ瘡 | じん麻疹 | |
| 精神神経系 | めまい、頭痛 | しびれ感、抑うつ気分、睡眠障害、傾眠 | 易刺激性、片頭痛 |
| 循環器 | 動悸、高血圧 | ||
| 消化器 | 膨満感 | 食欲不振、悪心、下痢、腹痛、逆流性食道炎 | 嘔吐、排便痛 |
| 肝臓 | 肝機能異常(AST増加、ALT増加、ALP増加) | ||
| 血液 | 白血球数減少、貧血(赤血球数減少、ヘモグロビン量減少、ヘマトクリット値低下) | ||
| 骨・筋肉 | 背部痛、四肢痛、筋骨格硬直、関節炎 | 四肢重感 | |
| その他 | 血中トリグリセリド増加、浮腫 | 疲労、潮紅、血中Ca減少、アンチトロンビンIII減少、耳鳴、耳不快感、鼻出血、血中フィブリノゲン増加 | コンタクトレンズ不耐性、鼻咽頭炎、過換気 |
本製品は海外製のため、期限表記が日本と異なる場合がございます。
パッケージ裏面や側面、シートなどに以下のような表記がされています。
| EXP | 使用期限 例:EXP 12/2025→2025年12月まで使用可 |
|---|---|
| MFG または MFD | 製造日 例:MFG 03/2023 |
| BEST BEFORE | 品質が最も安定している目安日 |
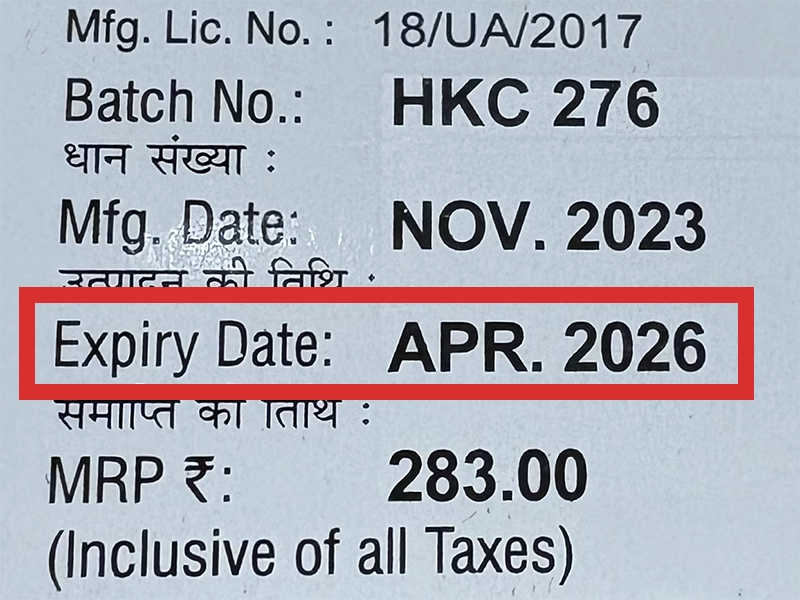
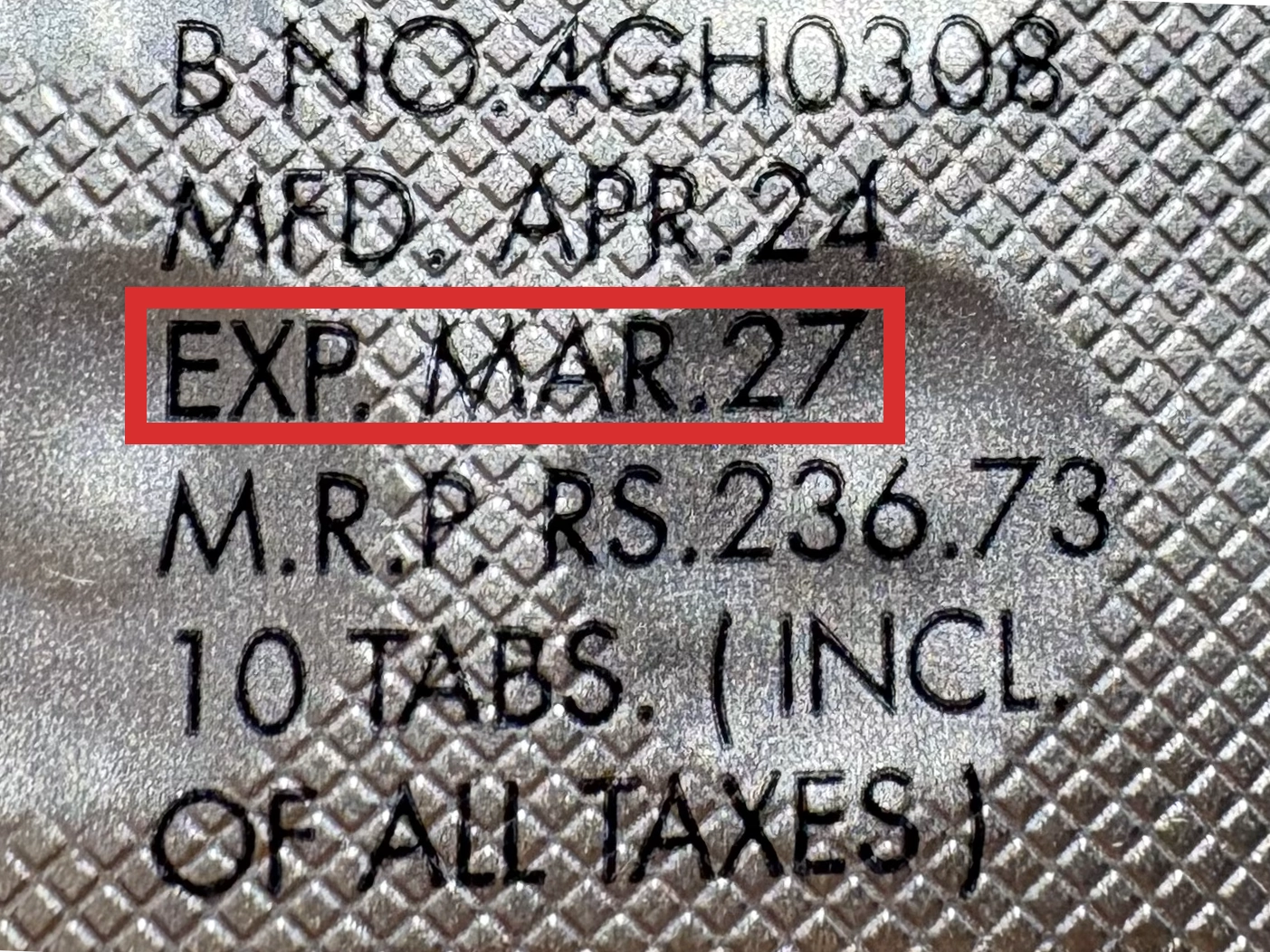
※国や製品により日付の並び(例:月/年、日/月/年)が異なる場合がありますのでご注意ください
EXP(Expiry Date) の表記がなく、MFG または MFDしか記載がないケースがあります。
この場合は MFG(MFD) から2~3年が使用期限の目安です。
※「LOT」や「BATCH」の表記は製造番号であり期限ではありません。

パッケージ例となります。
商品やご注文単位によってはシート単位でのお届けとなる場合が御座います。
外箱に当サイト名や商品名が記載されることはないため、ご家族や配達員など第三者に内容を知られることは御座いません。
更年期の影響で精神的に不安定になっていましたが、この薬で治療を継続すると気分が良い日が増えました。前向きになれているのが一番嬉しいです。
更年期による不眠と頻繁なほてりに悩んでいましたが、オエストロジェルを使い始めてから改善されています。睡眠の質が向上すると日中のイライラも減少しています。
更年期障害の症状として、肌の乾燥や関節の痛みなどが出ておりましたがこのジェルを塗ると肌の調子も良く、体調も良くなっています。女性ホルモンを失わないように毎日塗っています。
このオエストロジェルは非常に良いです!ホルモンバランスが整い穏やかに過ごせる日が多くなりました。
更年期に入り、イライラする事が増えてしまいましたが、オエストロジェルを使用して症状が緩和されている事を実感しています。精神的に落ち込む日も減っており、夫も喜んでくれています。
商品口コミの投稿は会員のみ行えるようになっております。
お手数ですが会員ログインの上でご投稿頂きますようお願いいたします。
口コミをご投稿頂いたお客様にはポイントをプレゼントさせて頂いております。
文章のみであれば100ポイント、文章+写真付きのものは300ポイントをプレゼントさせて頂きます。
規約や詳細などはこちらをご確認くださいませ。